











 Espanhol (pdf)
Espanhol (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por email Citado por SciELO
Citado por SciELO  Similares em
SciELO
Similares em
SciELO 
 Permalink
PermalinkINTRODUCCIÓN
Los avances en el uso de vehículos aéreos no tripulados (UAV) para la generación de mapas de malas hierbas en momentos tempranos que permiten la aplicación oportuna y específica de herbicidas siguiendo estrategias de agricultura de precisión (AP), han impulsado el interés de la industria en llevar esta tecnología a nivel comercial. Para ello, también es necesario integrar un Sistema de Apoyo a la Decisión (DSS) que recomiende el herbicida y la dosis adecuados según el tipo y densidad de malas hierbas detectadas en los mapas. El objetivo global de este trabajo fue demostrar la posibilidad de un control optimizado de malas hierbas utilizando técnicas de agricultura de precisión. Para ello, se coordinaron varias empresas y grupos de investigación con el fin de proporcionar e integrar la tecnología necesaria para alcanzarlo mediante los siguientes puntos: 1) teledetección con drones y análisis de imágenes (a cargo del grupo de investigación Tec4agro, del CSIC), 2) sistema de soporte a la decisión IPMwise (a cargo de la empresa IPM Advice SL, spinoff de la UdL), y 3) pulverizador comercial de dosis variable con barra de aplicación boquilla a boquilla (de las empresas Bayer Agroscience, Bardenas Comercial y Sertagro).
MATERIALES Y MÉTODOS
Los ensayos se llevaron a cabo en dos campos comerciales de maíz denominados Sodeto y Moncalver en la provincia de Huesca, en el NE de España. con coordenadas centrales X=727.465, Y=4.642.560, y X=731.259, Y=4.624.030 (sistema UTM, zona 30-N), respectivamente. Ambas parcelas presentaban con rastrojos del cultivo anterior (cebada) sobre los cuales se sembró maíz en segunda cosecha, y contaban con riego por aspersión. Se aplicaron diversos tratamientos herbicidas en ambas parcelas en preemergencia para forzar la variabilidad entre las diferentes zonas del experimento (Tabla 1). El diseño experimental consistió en delimitar zonas de tratamiento con un ancho de base de 18m y una longitud variable dependiendo de las dimensiones y forma de cada parcela experimental, resultando 2,74ha en Sodeto y 1,89ha en Moncalver. Se intercalaron 6 zonas control entre los tratamientos. El objetivo de estos tratamientos fue incrementar la variabilidad en las infestaciones (especies y densidades) y así someter a los algoritmos de identificación a escenarios de diversa complejidad.
Tabla 1 Tratamientos aplicados en pre-emergencia para forzar la variabilidad
| Tratamiento | Producto | Dosis (ml/ha) | Especies que se esperaba que sobrevivieran al tratamiento |
| 1 | S-Metolachlor 31,25% + Terbutilazine18,75% | 3.500 | Ricio de cebada / Abutilon theophrasti |
| 2 | Isoxaflutol 22,5% +Thiencarbazone 9% | 440 | Ninguna |
| 3 | Isoxaflutol 24% | 300 | Gramíneas |
| 4 | Pendimethalin 33% | 3.000 | Echinochloa/Ricio de cebada/Xanthium |
| 5 | DMTA-P 72% | 1.400 | Dicotiledóneas |
| 6 | Sulcotrione 30% | 750 | Amaranthus spp. |
Los vuelos con dron para tomar imágenes de ambas parcelas se realizaron el 7 de julio de 2022, unos 15 días después de los tratamientos de preemergencia. Se utilizó un dron DJI modelo Matrice 300-RTK. Los vuelos se realizaron a una altura de 40 m sobre el suelo y utilizando dos cámaras simultáneamente, una de espectro visible-RGB modelo DJI Zenmuse-P1 (https://www.dji.com/es/zenmuse-p1) y otro modelo multiespectral, Parrot Sequoia+ (https://www.parrot.com/en/shop/accessories-spare-parts/other-drones/sequoia). Posteriormente, se utilizó el software comercial Agisoft Photoscan para alinear las imágenes, construir la geometría y la nube de puntos y, finalmente, generar el ortomosaico de cada parcela (Figuras 1a, 1b), con información georreferenciada con el apoyo de puntos de control adquirido en tierra con un GPS diferencial modelo Trimble R2 (Figura 1c).

Los ortomosaicos se procesaron utilizando un algoritmo avanzado de Análisis de Imágenes Basado en Objetos (OBIA) generado por el grupo Tec4agro específicamente para este trabajo y adaptado de versiones anteriores (Peña et al., 2013; Pérez-Ortiz et al., 2015). El algoritmo se compuso de una secuencia de fases que incluyen segmentación, detección de hileras de cultivos, discriminación de cultivos, malezas y suelo desnudo/rastrojos utilizando parámetros espectrales y contextuales y refinamiento de los resultados de clasificación utilizando el algoritmo Random Forest (de Castro et al., 2018).
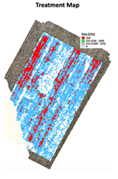
A partir de los mapas de malezas generados en cada parcela, se generaron los mapas de tratamiento a partir de la especie y la densidad utilizando el DSS IPMwise (Montull et al., 2020). Si bien el pulverizador utilizado (Cóndor AGRIFAC) puede leer archivos con una malla de hasta 0,25x0,25m2, se realizó el tratamiento con una rejilla de dimensiones 1x1m2.
El umbral de tratamiento fue 1 planta/m2; para esta densidad, el nivel de eficacia objetivo fue del 92%. Esta eficiencia objetivo aumenta linealmente hasta alcanzar una densidad de 300 plantas/ m2, donde se estableció un nivel de eficacia objetivo del 97%. Según el estado fenológico y las condiciones de tratamiento, fueron necesarios 2,5l/ha de Cubix + 300g/ha de Laudis WG + 0,5l/ha de Biopower para conseguir un 97% de eficacia. Para conseguir un 92% de eficacia la dosis necesaria fue 2l/ha de Cubix + 240g/ha de Laudis WG + 0,4l/ha de Biopower. La evaluación de las eficacias en postemergencia se realizó 22 días después de la aplicación del tratamiento herbicida descrito (Figura 2).
RESULTADOS Y DISCUSIÓN
Después de los tratamientos de preemergencia, la práctica totalidad de malas hierbas presentes eran ricio de cebada, el cultivo anterior. La cobertura y eficacia observadas justo tras el vuelo puede verse en la Tabla 2. Esta información sirve de base para su posterior uso como verdad sobre el terreno en la evaluación de tratamientos localizados aplicados a partir de los mapas generados con el dron.
Tabla 2 Densidad de malas hierbas y eficacia observada
| Moncalver | Sodeto | |||||
| Herbicida y dosis | Densidad (pl/0,1m2) | Eficacia (%) | Densidad (pl/0,1m2) | Eficacia (%) | ||
| No tratado | 32,0 | --- | 24,0 | --- | ||
| S-Metolachlor 31,25% + Terbutilazine 18,75% -3500 | 7,0 | 78,13 | 4,8 | 79,86 | ||
| Isoxaflutol 22,5% +Thiencarbazone 9%-440 | 1,8 | 94,27 | 0,5 | 97,92 | ||
| Isoxaflutol 24%-300 | 8,0 | 75,00 | 7,7 | 68,06 | ||
| Pendimethalin 33%-3000 | 6,3 | 80,21 | 14,3 | 40,28 | ||
| DMTA-P 72%-1400 | 5,0 | 84,38 | 8,0 | 66,67 | ||
| Sulcotrione 30%-750 | 5,5 | 82,82 | 9,5 | 60,42 | ||
Debido a la distribución variable del ricio de cebaba y considerando un umbral mínimo de tratamiento de 1 planta/m2, el área tratada según los mapas de tratamiento fue de 1,91 ha y 1,30 ha en Sodeto y Moncalver, respectivamente, por lo que se asumió que el área libre de herbicida el tratamiento fue del 30,29% en Sodeto y del 31,46% en Moncalver. Sin embargo, esto no se corresponde exactamente con el área libre de herbicidas debido a la cuadrícula de 1x1m.
El ahorro de herbicida asociado a la aplicación de la variable se determinó comparando el volumen de mezcla aplicado en un supuesto de tratamiento convencional uniforme (250 l/ha en toda la parcela) y el volumen aplicado siguiendo los mapas de tratamiento.
- Pulverización uniforme en todo el campo:
Sodeto: 250 (l/ha) * 2,74 ha = 685,00 l. Moncalver: 250 (l/ha) * 1,89 ha = 472,50 l.
- Pulverización variable:
Sodeto: [Promedio. 215 (l/ha) * 1,65 ha] + [Promedio. 237 (l/ha) * 0,01 ha] + [Promedio. 250 (l/ha) * 0,25 ha] = 419,62 l.
Moncalver: [Promedio. 215 (l/ha) * 1,03 ha] + [Promedio. 237 (l/ha) * 0,01 ha] + [Promedio. 250 (l/ha) * 0,26 ha]= 288,82 l.
Por tanto, el ahorro obtenido en la parcela de Sodeto fue de 265,38 litros y en la parcela de Moncalver de 183,68 litros, lo que significó un 38,74 % y un 38,87 % en cada parcela, respectivamente. Esto corresponde, al precio real de los herbicidas pulverizados, a un ahorro de 29,88 €/ha.
Eficacia de la pulverización basada en mapas de tratamiento
Las eficiencias obtenidas estuvieron en línea con lo esperado, observándose un control prácticamente total de las malas hierbas presente en la parcela. Aun así, algunos individuos aislados bajo la línea de cultivo no fueron bien controlados, lo que puede deberse a varias razones:
1) no fueron detectados en las imágenes tomadas con el dron debido a su ubicación debajo del cultivo,
2) no recibieron suficiente dosis debido al efecto paraguas que ejerce el cultivo,
3) el tratamiento se realizó con la barra a 3m sobre el objetivo, debido a que tiene un ancho de trabajo de 36m y las calles entre aspersores son de 18m de ancho, lo que pudo haber afectado la cobertura del tratamiento en algunas zonas.
CONCLUSIONES
Las conclusiones que se pueden extraer de este trabajo son las siguientes:
- La detección y el tratamiento variables son posibles con la tecnología disponible actualmente
- IPMWise DSS facilita la generación de mapas de aplicaciones variables por especie y densidad
- La detección y el tratamiento en la línea se complicaron por el rápido crecimiento del maíz.

