











 Espanhol (pdf)
Espanhol (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por email Citado por SciELO
Citado por SciELO  Similares em
SciELO
Similares em
SciELO 
 Permalink
Permalink1. Introducción
La aparición de residuos sólidos en las costas representa hoy en día un desagradable problema para la mayoría de las ciudades costeras españolas y europeas, que se ven obligadas a invertir grandes sumas de dinero para paliar los efectos negativos que estos sucesos tienen en el turismo costero y en el bienestar social. La Unión Europea reconoce oficialmente a las llamadas comúnmente toallitas higiénicas como uno de los contaminantes de mayor impacto en su Decisión 2017/848/UE (UE, 2017), y define directivas para su eliminación. España identifica a las toallitas como uno de los puntos clave de su campaña de sensibilización y alerta sobre su uso correcto en el decálogo ciudadano contra las basuras marinas publicado en octubre del 2018 por el Ministerio para la Transición Ecológica (MITECO, 2018).
El trabajo que se presenta aquí se enmarca en un proyecto de investigación cuyo objetivo final es proporcionar una herramienta de predicción de los hallazgos de residuos sólidos en las playas y se presenta, como caso de estudio del proyecto, el ejemplo de las toallitas higiénicas halladas periódicamente en las playas urbanas de la ciudad de Málaga. El objetivo principal puede alcanzarse a través de dos objetivos secundarios que tienen naturalezas complementarias: la científica y la tecnológica. El primer objetivo pretende desarrollar un modelo numérico hidrodinámico que pueda predecir de forma verosímil la circulación de la zona objeto de estudio, apoyándose en condiciones de contorno procedentes de las predicciones oceánico-meteorológicas. El segundo objetivo contempla el desarrollo e implementación de un sistema electrónico de radiofrecuencia (que en lo sucesivo se denominará sistema de seguimiento) que sea una herramienta de validación in situ del modelo numérico previsto en la parte científica. El presente documento se centra exclusivamente en este segundo objetivo, aunque, obviamente, su requisito funcional está ligado al primer objetivo.
El sistema se compondrá de dos tipos de dispositivos: boyas de deriva superficial (boyas Lagrangianas) y receptores en embarcaciones de superficie que permitan la extracción en tiempo real de los datos de las trayectorias de las boyas. Las boyas incorporarán un receptor GNSS (en inglés, Global Navigation Satellite System) que registrará su posición y serán nodos de una red con capacidad de determinar su posición. Una vez implementado con éxito el sistema de seguimiento, éste se desplegará en condiciones ambientales controladas para poder verificar las trayectorias esperadas de los residuos sometidos a distintos forzamientos externos y contrastar así los resultados del modelo hidrodinámico. Este sistema de seguimiento puede servir no sólo como herramienta de validación de modelos numéricos. También representa una metodología escalable, con amplio potencial de uso en el campo de la Oceanografía observacional, ya que permite reconstruir las corrientes de deriva locales con una resolución espacial mucho mayor que cualquier modelo numérico.
A modo de introducción, se hará una presentación general del sistema electrónico de radiofrecuencia (sistema de seguimiento) y, a continuación, en las sucesivas subsecciones, se proporcionarán los detalles de sus elementos. Se ha comenzado diseñando un sistema de seguimiento de boyas Lagrangianas (Niiler et al., 1995; Martínez-Ledesma, 2011; García-Ladona et al., 2016), cuya finalidad es trazar la trayectoria de cada una de ellas mientras se encuentren dentro del alcance de un sistema con tecnología LoRa de comunicaciones y reportar esas trayectorias a un ordenador central. El motivo de incorporar tecnología LoRa es doble: primero, para minimizar el riesgo de pérdida de datos por la avería o pérdida de una boya; segundo, para facilitar su localización en caso de perderse de la vista de la embarcación nodriza o porque se abandonen para el trazado de trayectorias durante varias horas.
El término largo alcance LoRa (del inglés Long-Range) trata de una tecnología de radiofrecuencia que permite comunicaciones de datos con bajo consumo eléctrico (SEMTECH, 1960). Esta tecnología se utiliza para instalaciones donde no se disponga de alimentación eléctrica o no se desee radiar más energía de la estrictamente necesaria, así como aplicaciones del tipo IoT (del inglés Internet of Things) en las que se transmiten pequeños volúmenes de información. En principio, la nomenclatura utilizada en la práctica describe LoRa como una tecnología basada en modulaciones de espectro ensanchado, mientras que LoRaWAN se utiliza para la arquitectura de sistema y el protocolo de comunicaciones. LoRaWAN está gestionado por LoRa Alliance (LoRa, 2024), que es una asociación abierta y sin ánimo de lucro, cuyo propósito es la promoción y la gestión de dicho estándar que se describe en la recomendación ITU-T Y.4480 de la Unión Internacional de Telecomunicaciones (ITU, 2021).
La tecnología de redes de área extensa de bajo consumo ya ofrece comunicación de largo alcance, lo que permite nuevos tipos de servicios (Tipán-Alcívar et al., 2022; González-Palacio et al., 2020). Existen varias soluciones (Goursaud & Gource, 2015), entre las que cabe destacar M2M (Machine-to-Machine) que tiene la ventaja de ser ofrecida por operadores de telefonía celular, lo cual abarata algunos costes, pero no está disponible en el mar cuando se sale del alcance de las estaciones costeras de los operadores, y redes de área extensa de baja potencia LPWAN (en inglés, Low Power Wide Area Network) que permiten transmitir datos entre un dispositivo y una estación base separados por centenares de metros o incluso algunos kilómetros con muy bajo consumo energético (Link Labs, 2016). LoRaWAN es sin duda la tecnología más adoptada de las LPWAN porque no depende de un operador y está madura, encontrándose en el mercado soluciones LoRa de coste muy asequible. La tecnología LoRa dispone de un nivel físico de bajo consumo eléctrico que nominalmente consigue alcances de alrededor de 2 km en zonas urbanas y mayores en zonas con menor presencia humana. En transmisión, su principal inconveniente es el pequeño régimen binario (entre 0,3 y 27 kb/s). Régimen binario y alcance son parámetros interrelacionados; si aumenta uno, disminuye el otro (Adelantado et al., 2017).
2. Arquitectura del sistema de seguimiento
El sistema desarrollado consiste en un conjunto de boyas equipadas con dispositivos electrónicos y un equipo colector de la información de posición que envía cada boya. En la Figura 1 se muestra la configuración del sistema mediante un esquema de bloques. Funcionalmente, el sistema consta de un subsistema de cálculo de la posición de las boyas, un subsistema de comunicaciones y un subsistema de presentación y almacenamiento. Estas funciones están repartidas entre los distintos elementos del sistema. En lo que se refiere a denominación, se usa como referencia el subsistema de comunicaciones y en lo sucesivo se llamará nodo a los elementos que se alojan en cada una de las ubicaciones, que pueden ser las boyas de deriva en lo relativo a la determinación de la posición y la transmisión de ésta hacia el subsistema de presentación y almacenamiento y también este último subsistema. Se dirá “nodo transmisor” para referirse a la unidad funcional alojada en una boya y “nodo receptor” a la unidad funcional del subsistema de presentación y almacenamiento.
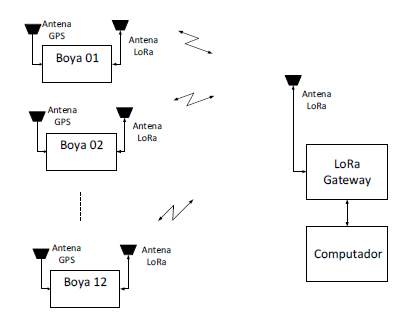
Un Gateway (en español podría traducirse como “pasarela”) es un dispositivo electrónico que forma parte de una red de comunicaciones cuya misión es interconectar otros dispositivos de red para compartir recursos entre dos o más ordenadores. Se trata normalmente un equipo informático configurado para dotar a las máquinas de una red de área local LAN (en inglés Local Area Network) conectadas a él de un acceso hacia una red exterior, muy frecuentemente Internet. En el caso presente, el Gateway se usará como concentrador de los datos de la red LoRaWAN. El sistema desarrollado puede realizar el seguimiento de hasta ocho boyas. Esta cifra viene determinada por dos circunstancias: la primera es la capacidad, en bit/s, del enlace LoRa junto con la longitud del mensaje que envían las boyas al Gateway; y la segunda es el alcance nominal del enlace LoRa, que no cubra el área donde se han desplegado las boyas.
Los dispositivos electrónicos de cada una de las boyas se muestran en la Figura 2. Estos dispositivos a bordo de las boyas, o nodos transmisores, incorporan un módulo receptor GPS (en inglés, Global Positioning System) del cual leen la posición de la boya en la que están instalados, almacenan esa posición y el instante de lectura en la memoria interna del dispositivo y lo envían a través de un enlace LoRa a un Gateway que se encuentra en un buque de superficie. En la Figura 1 y en la Figura 2 se muestra, de forma esquemática, que los nodos transmisores y receptores están equipados con esos módulos de comunicaciones, lo que se ha reflejado con los símbolos de las respectivas antenas.
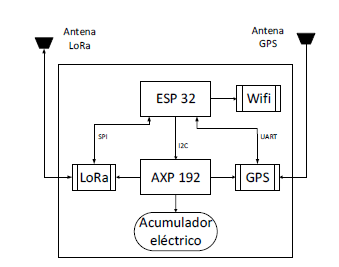
En la Figura 2 se muestra el esquema de bloques del nodo transmisor que se describen sólo desde el punto de vista funcional. El elemento principal es un microcontrolador de bajo consumo (ESP32 en la figura). Este microcontrolador usa distintos tipos de buses para comunicarse con los otros módulos. Los que se usan en la aplicación en cuestión son: el módulo GPS conectado por un bus serie UART (en inglés, Universal Asynchronous Receiver-Transmitter), que es encargado de obtener la posición del nodo del sistema; el módulo LoRa conectado por un bus serie síncrono SPI (en inglés, Serial Peripheral Interface), que constituye el nivel físico de la red LoRaWAN y el controlador de la alimentación eléctrica (AXP 192) conectado a través de un bus I2C (en inglés, Inter-Integrated Circuit). Este controlador sirve, entre otras cosas, para gestionar la carga de un acumulador eléctrico (coloquialmente batería) de reserva por si cae la alimentación externa. En la presente aplicación se opera en sentido inverso, es decir, el acumulador es la fuente principal de alimentación del nodo. Más adelante, se describe el tipo de acumulador que se utiliza en este prototipo.
2.1. Requisito funcional
El objetivo de esta parte del proyecto es el diseño y la construcción de un conjunto de elementos que permitan adquirir, monitorizar y almacenar en memoria la velocidad vectorial de la corriente superficial en el mar. En la medida de lo posible, se diseñará un sistema que cumpla los estándares WOCE (en inglés, World Ocean Circulation Experiment) (Lumpkin et al., 2017; Richardson, 2001; Sybrandy & Niiler, 1991).
El requisito funcional del sistema de seguimiento se articula en los siguientes puntos:
La boya debe tener una autonomía eléctrica de 24 h y no constituir un peligro para la navegación.
La boya debe almacenar su trayectoria (instante y posición) al menos una vez por minuto) durante, al menos, 24 horas.
La boya debe enviar el dato de su posición en tiempo real por un enlace usando el protocolo LoRaWAN, al menos una vez por minuto. Si la boya detecta que no está dentro del alcance de un receptor, no transmitirá sus datos de posición. Si recupera el enlace, debe continuar con la transmisión.
El desplazamiento de las boyas debe ser debido principalmente a la deriva y no al abatimiento por viento. Para ello, se busca que el cociente entre las superficies de la obra viva y de la obra muerta de las boyas llegue a ser 40, sin por ello constituir un peligro para las personas, ni para la navegación o el medio ambiente.
El sistema permitirá almacenar individualmente la trayectoria de distintas boyas, al menos ocho de ellas (en la Figura 1 se muestran hasta 12, pero por motivos ya indicados, se ha considerado que ocho es un número satisfactorio).
La boya será fácilmente desplegable y su continente contará con la forma adecuada para poder ser recuperada y subida a bordo de una embarcación con ayuda de un bichero.
2.2. Esquema de funcionamiento del sistema de posicionamiento
La Figura 3 muestra el esquema de funcionamiento del sistema de posicionamiento, donde están clasificados los requisitos funcionales del sistema. La Tabla 1 muestra la clasificación detallada, así como la prioridad y la precedencia de los distintos requisitos. Una descripción somera de estos requisitos se detalla a continuación:
R1.1 Identificación: Los nodos transmisores se auto-numeran para determinar una identificación propia de cada nodo, con el fin de que el procesador central separe los distintos mensajes y trace la trayectoria de cada boya.
R1.2 Leer GPS: Los nodos transmisores se comunican con el módulo GPS de la placa del microcontrolador para leer los datos que le entrega.
R1.3 Procesar datos: De la trama que entrega el módulo GPS se extraen los datos de interés y se procesan. Los datos que se extraen son Latitud, Longitud, Hora, Fecha, Incertidumbre.
R1.4 Formato de datos: Los datos de identificación de la boya, coordenadas geométricas e instante de tiempo se combinan con un formato determinado. Ese formato es: El formato de la trama de comunicación entre nodo transmisor y el receptor debe ser: id, ddmmyy (fecha), hhmmss (tiempo), Latitud, N/S, Longitud, W/E, Incertidumbre.
R1.5 Almacenar datos: El microcontrolador almacena los datos formateados en R1.4 en la memoria interna del nodo al menos una vez por minuto.
R1.6 Enviar datos: Los datos formateados también se envían al nodo receptor, dotado de un Gateway LoRa, al menos una vez por minutos.
R2.1 Mostrar datos: El nodo receptor dispondrá de una interfaz donde se muestren los datos recibidos de los nodos transmisores. Esta interfaz puede ser la pantalla de un ordenador de tipo PC.
R2.2 Salvar datos: El nodo receptor almacenará los datos recibidos en su memoria interna.
R2.3 Identificación de datos: El nodo receptor separará los datos de cada una de las boyas.
R3 Transferencia de ficheros: Los ficheros almacenados en el nodo receptor deben ser transferibles a un ordenador de tipo PC. Habrá un fichero por boya.
R4 Extracción de Datos: Independientemente de su transmisión por el enlace LoRa, los datos almacenados en cada nodo transmisor podrán ser extraídos de la boya una vez recuperada ésta.
R5 Autonomía: La autonomía del nodo transmisor debe será de al menos 24 horas.
R6 Uso de LoRa: Las comunicaciones entre el nodo receptor y los nodos transmisores utilizarán tecnología LoRa.
La Tabla 1 muestra la clasificación detallada, así como la prioridad y la precedencia de los distintos requisitos.
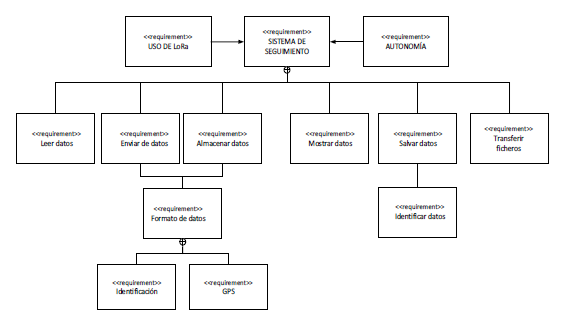
Tabla 1 Prioridad y precedencia de los requisitos funcionales (1 es la mayor prioridad).
| ID | Nombre | Prioridad | Precedencia |
|---|---|---|---|
| R 1.1. | Identificación | 1 | |
| R1.2 | Leer GPS | 1 | |
| R1.3 | Procesar datos | 1 | R1.2 |
| R1.4 | Formato datos | 1 | R1.3, R1.1 |
| R1.5 | Almacenar datos | 2 | R1.4 |
| R1.6 | Enviar datos | 1 | R1.4 |
| R2.1 | Mostrar datos | 2 | R1.6 |
| R2.2 | Salvar datos | 1 | R1.6 |
| R2.3 | Identificar datos | 1 | R1.6, R1.1 |
| R3 | Transferir ficheros | 1 | R2.2 |
| R4 | Extraer datos | 1 | R1.5 |
| R5 | Autonomía | 2 |
3. Prototipo del nodo transmisor
El nodo transmisor es el conjunto de elementos que se alojan en cada una de las boyas de deriva. Se han construido cuatro prototipos del nodo transmisor, que se han montado en unas seudo boyas basadas en una maleta estanca. Por tratarse de boyas de superficie, que no se espera que pasen en el agua más de 24 horas, no se ha considerado necesario hacer un diseño específico, lo que habría encarecido y retrasado su fabricación. No obstante, las maletas tienen la certificación de clase de protección IP67, y la integración de los componentes y las antenas se ha realizado garantizando el mismo estándar. Esto asegura que la boya pueda soportar las adversas condiciones ambientales del ambiente marino a las que se enfrenta. El principal elemento del nodo receptor, el cual aparece como ESP32 en el esquema de bloques de la Figura 2, es el sistema microcontrolador que se muestra en la Figura 4. Se trata del sistema LILYGO TTGO TBeam v1.0 (LILYGO, 2024) que está basado en el microntrolador ESPRESSIF ESP32 e incorpora, además de ese circuito integrado y la memoria interna, un GPS Neo-6 y un módulo LoRa SX1278 de Semtech (Módem LoRa SX1278, 2024).
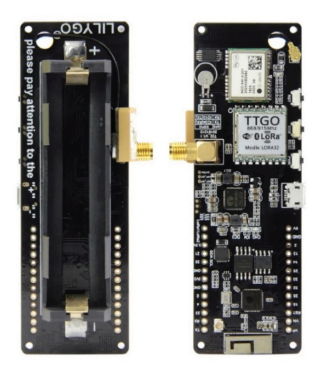
El sistema microcontrolador se alimenta mediante un acumulador eléctrico que se instala en el soporte que puede observarse en la imagen izquierda de la Figura 4. Se trata de un acumulador recargable Samsung 18650 de ion-Litio, 3,7V, 2,6 A·h, de terminal plano, con lo que se obtiene la autonomía requerida de 24 h.
Se ha diseñado y construido un pequeño mástil cuya finalidad es ubicar las dos antenas del nodo, para alejarlas del agua y separarlas una de otra y que, al mismo tiempo, ofrezca una resistencia al viento lo menor posible y no comprometa la estabilidad de la boya. El conjunto se muestra en la fotografía de la Figura 5, donde se observa a la izquierda la antena GPS, que es una antena activa CTI AEB-275 con ganancia nominal de 28 dB. A su derecha, en la fotografía, se observa la antena LoRa de uso común. En Europa, LoRa opera en las frecuencias de 863-870/873 MHz, mientras que GPS usa las frecuencias de 1575,42 MHz y 1227,6 MHz, por lo que la separación espectral consigue la no interferencia de ambas operaciones.
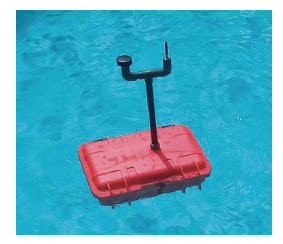
Figura 5 Conjunto de pseudo boya y pequeño mástil que soporta las antenas GPS (izquierda) y LoRa (derecha).
La boya que aloje la electrónica de los nodos transmisores debe ser una boya Lagrangiana, es decir, que se mueva por deriva, no por abatimiento. Obviamente, ese objetivo no se cumplirá completamente, ya que parte del costado de la boya quedará por encima de la línea de flotación (obra muerta). Para que el abatimiento sea mucho menor que la deriva se han tomado las siguientes medidas:
Se lastra la boya con grava y mortero para que al menos el 90% de su costado quede por debajo de la línea de flotación.
Se dota a la boya de una vela submarina. Es una práctica común en boyas de deriva (Martínez, 2011). Esa vela es un cilindro circular de 4 m de generatriz y circunferencia directriz de 0,6 m de diámetro. Para fabricarla, se cosen juntos los dos lados largos de una lona de vela rectangular de 4 m x 1,9 m. Para mantener la forma cilíndrica se usan cuatro sables de 1,8 m x 0,05 m x 0,002 m que se insertan en unos bolsillos cosidos horizontalmente a la vela, dos en ambos extremos del cilindro y otros dos separados 1,3 m de los anteriores. Y finalmente se lastra con cuatro plomos de submarinista de 0,5 kg cada uno, que se insertan en unos bolsillos cosidos justo encima del sable inferior.
3.1. Software del nodo transmisor
La programación de los nodos transmisores se ha realizado en lenguaje C, utilizando el entorno de desarrollo integrado (IDE, del inglés Integrated Development Environment) Visual Code. Durante dicho desarrollo fue necesario buscar librerías específicas para poder utilizar el módulo LoRa (GitHub, 2024 esp32) y poder encender los módulos LoRa y GPS haciendo uso del controlador eléctrico AXP192 (GitHub, 2024 axp192), ya que, todas las librerías y ejemplos para el dispositivo LILYGO se encuentran disponibles para el entorno Arduino.
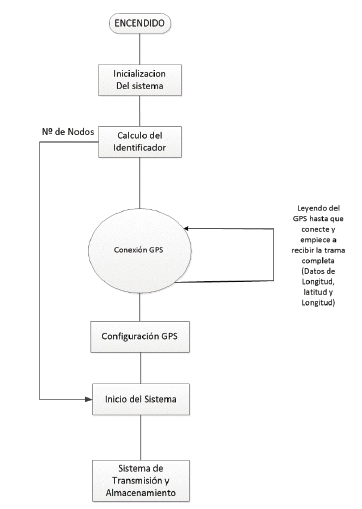
En la Figura 6 se muestra el diagrama de flujo del software del nodo transmisor. Tras el encendido y la inicialización propia del microcontrolador, el nodo procede a determinar su identificador, que es el código que se utiliza en el nodo receptor para separar las distintas trayectorias de los nodos transmisores. A continuación, el microcontrolador establece la conexión con el módulo GPS, lo configura, que es proporcionarle los parámetros que deciden el tipo de trama y la tasa de refresco, principalmente, y procede a extraer los datos de posición de la trama que recibe. Luego empaqueta los datos que necesita transmitir con el formato propietario que se ha elegido, que es el descrito en R1.4 de la Subsección §2.2. Por último, los almacena en memoria y los transmite a través del enlace LoRa al Gateway. Tras la inicialización de los módulos periféricos del microcontrolador, las demás tareas las realiza en bucle cerrado, una vez por minuto. Si el nodo transmisor no hubiese estado dentro del alcance del enlace LoRa, todo o parte del tiempo en que ha estado operativo, cuando se recupera la boya es posible conectar el nodo mediante un puerto serie de tipo USB (en inglés, Universal Serial Bus) a un ordenador y extraer la trayectoria de la boya de la memoria interna del nodo.
Ahora pasamos a los casos de pruebas diseñados para verificar el correcto funcionamiento del nodo transmisor desarrollado en el proyecto, con el fin de validar la aplicación y comprobar que se cumplen todas las especificaciones enumeradas en el apartado de requisitos. Para realizar las pruebas relativas se han utilizado los dispositivos y circuitos junto con la programación, mencionados en los apartados anteriores. Estas pruebas están referidas a la lectura de GPS, el envío y almacenamiento de tramas de información, así como la autonomía de los nodos. Para alguna prueba es necesario conectar el nodo transmisor a un PC para comprobar, mediante el puerto serie, si la lectura de datos del GPS se realiza de forma correcta o si las tramas de información son almacenadas en la memoria interna del nodo, de manera adicional es necesario emplear un receptor LoRa para comprobar la prueba de envío de datos.
Las pruebas realizadas se detallan en los siguientes puntos:
Lectura del GPS. Prueba: Conectar y leer las tramas de información de datos procedentes del GPS. Resultado: El nodo lee del GPS las tramas de información mostrando por pantalla tanto la trama leída directamente del GPS como la trama procesada que se utilizará para el envío de datos y su almacenamiento. La boya deberá tener una autonomía eléctrica de 24 h y no constituir un peligro para la navegación.
Almacenamiento de datos en el nodo transmisor. Prueba: Escribir en un fichero de texto dentro de la memoria interna del nodo receptor la trama de datos procedente del GPS. Resultado: Las distintas tramas quedan almacenadas en orden de escritura en un fichero de texto en la memoria interna del nodo, en la cual pueden ser leidas posteriormente.
Envío de datos. Prueba: Transmitir por el enlace LoRa las tramas de datos GPS procesadas. Resultado: El nodo receptor recibe la información enviada vía LoRa y la muestra en una interfaz de consola.
Autonomía. Prueba: Alimentar los nodos transmisores para que el sistema esté funcionando mientras no se agote la energía del acumulador. Resultado: Los nodos se encuentran en funcionamiento durante más de 24 horas, que es el requisito requerido.
4. Prototipo del nodo receptor
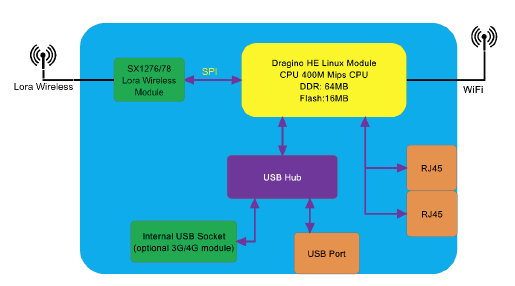
Se ha diseñado y ensamblado un prototipo del nodo receptor, que consta, básicamente, de un Gateway LoRa y un ordenador de tipo PC. Estos dos equipos se utilizarán en el puente de un buque de superficie y, en principio, no precisan de un recipiente estanco. Para el Gateway se ha seleccionado el dispositivo DRAGINO LG01-N formado por un Gateway LoRa de un solo canal y de código abierto, que permite conectar una red inalámbrica LoRa a una red con protocolo IP. En la Figura 7 se muestra una fotografía del dispositivo y en la Figura 8 el esquema de bloques proporcionado por el fabricante (DRAGINO, 2023).

El Gateway DRAGINO está basado en el microprocesador ar9331 a 400 MHz e incorpora una memoria flash de 16 MB y una memoria RAM de 64 MB. Su conexión al ordenador tipo PC se realiza cómodamente a través de una red WiFi (se muestra esquemáticamente en la Figura 8), aunque también podría conectarse a través de uno de los puertos Ethernet (conector RJ45 en la Figura 8). El núcleo del Gateway es el router (bloque amarillo en la Figura) que sirve para multiplexar las comunicaciones de todos los terminales LoRa en un solo enlace ascendente (o saliente) y demultiplexar las comunicaciones del enlace descendente (o entrante) y enviar a cada terminal LoRa la que le corresponde. En la presente aplicación, este Gateway entrega al PC la información procedente de los nodos transmisores de manera que el PC puede extraer la enviada por cada uno de ellos. El Gateway elegido puede atender al menos 10 nodos LoRa y podría llegar a atender hasta 100 nodos; la cifra depende del volumen de datos que deba intercambiar con cada uno de ellos. En la aplicación de este proyecto se ha especificado que sean al menos 8. El Gateway se alimenta con 12 Vcc.
4.1. Software del nodo receptor
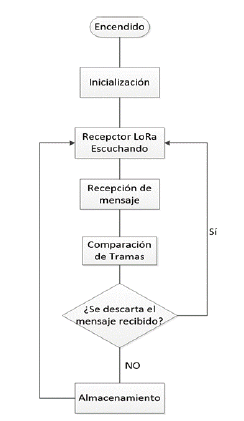
La programación del nodo receptor es relativamente más sencilla que la de los nodos transmisores, ya que consiste en recibir los mensajes LoRa, realizar una comparación y almacenarlos en la memoria interna del nodo. El diagrama de flujo de dicho programa se muestra en la Figura 9. Tras la inicialización del nodo, el receptor queda en modo escucha y cuando recibe una transmisión comprueba si se trata de una trama procedente de un nodo transmisor, en cuyo caso extrae los datos de la trama de acuerdo al formato ya explicado más arriba y los almacena en los ficheros independientes de cada uno de los nodos transmisores.
Pasemos a realizar las pruebas diseñadas para verificar el correcto funcionamiento del nodo receptor desarrollado en el proyecto. Estas pruebas están referidas a la recepción de mensajes vía LoRa, así como el almacenamiento interno en el Gateway y transferencia a un PC de dichos mensajes. Para estas pruebas es necesario conectar el nodo receptor (básicamente el Gateway Dragino LG01) a un PC mediante un enlace WiFi. Se utiliza el programa WinSCP (WinSCP, 2024) para transmitir ficheros entre el PC y el Gateway. WinSCP es una aplicación libre y de código abierto que implementa el protocolo SFTP (es un cliente SFTP) de intercambio de ficheros para el sistema operativo Windows.
Para validar el funcionamiento del nodo receptor se enviarán mensajes vía LoRa, desde distintos nodos, emulando el formato de las tramas de mensajes que enviarán los nodos transmisores. Las pruebas realizadas se detallan en los siguientes puntos:
Recepción de datos. Prueba: Enviar mensajes LoRa desde diferentes nodos emulando el formato de la trama de datos que utilizará el sistema final. Resultado: Se muestran en la interfaz todos los mensajes recibidos en el formato correcto, ignorando el resto de los mensajes recibidos.
Almacenamiento de datos en el nodo receptor. Prueba: Escribir los mensajes recibidos por LoRa en ficheros de texto independientes dentro de la memoria interna del nodo. Resultado: Se almacenan los datos de manera correcta en archivos de texto individuales en función del nodo transmisor de procedencia del mensaje gracias al id de la trama del mensaje.
Transferencia de los archivos al PC. Prueba: Transferir los ficheros almacenados en la memoria del Gateway al PC mediante WinSCP. Resultado: Desde WinSCP se accede a la memoria interna del nodo y podemos transferir los distintos ficheros de la memoria interna al lugar deseado del PC conectado al nodo.
5. Pruebas de verificación y validación del sistema completo
Las pruebas finales se realizan con el sistema de seguimiento al completo: conjunto firmware/hardware de los nodos transmisor y receptor que incluyen los módulos GPS y el sistema de comunicación LoRa. Para ello, se distribuyen los nodos por diferentes zonas de una sala y se deja el sistema funcionando hasta que se agota la energía almacenada en los acumuladores. De esta forma verificamos y validamos el funcionamiento completo del sistema en un entorno real. Las pruebas realizadas se detallan en los siguientes puntos:
Envío de datos. Prueba: Se pone en marcha el sistema con varios nodos transmisores funcionando, los cuales cada cierto tiempo procesarán los datos procedentes del GPS y enviarán la respectiva trama de datos empleando la tecnología LoRa. Las tramas deben de ser diferentes para cada transmisor ya que se encuentran colocados en sitios distintos y además cada uno de los nodos transmisores debe tener un ID único. Finalmente, en el nodo receptor podrán visualizarse las tramas recibidas en la interfaz de consola del PC. Salida: Los datos que llegan se muestran por pantalla y son almacenados en la memoria del nodo receptor. Verificación: Se comprueba la identificación correcta de cada nodo transmisor, la lectura de los datos del módulo GPS, el envío y recepción de datos, así como el funcionamiento de la interfaz de consola para mostrar los datos recibidos por el nodo receptor.
Identificación de datos. Prueba: Se transferirán los ficheros almacenados en el nodo receptor utilizando un PC y WinSCP. Salida: En WinSCP se pueden ver que los datos se encuentran almacenados en diferentes ficheros de texto dentro del receptor y además transferir dichos datos al PC. Verificación: En esta prueba se verifica primero la identificación de los nodos transmisores, después el almacenamiento en el nodo receptor de las tramas recibidas por LoRa en diferentes archivos en función del código identificador del transmisor que aparece en la trama, y por último la transferencia de los datos almacenados en la memoria interna del nodo receptor a un PC.
Autonomía. Prueba: Se medirá el tiempo que los nodos han estado funcionando desde que se encendieron hasta que se les haya acabado la energía del acumulador. Salida: Los datos almacenados en la memoria interna de los nodos transmisores acaban en el lugar previsto de la memoria del PC y pueden leerse en su pantalla, además los datos se almacenan una vez por minuto y a partir de dichos datos se obtiene el tiempo que han estado funcionando los distintos nodos transmisores. Verificación: Autonomía de los nodos transmisores ≥ 24 horas. Almacenamiento de la información y extracción de los datos almacenados en la memoria interna de los nodos transmisores.
6. Conclusiones y trabajos futuros
Se ha diseñado un sistema de seguimiento de boyas Lagrangianas y se han montado cuatro prototipos que se han instalado en unas maletas estancas que harán de continente de la boya. También se ha diseñado la vela para que la boya se desplace principalmente debido a la deriva. El objetivo del sistema era poder trazar las trayectorias de las boyas tras su recuperación después de 24 horas en el mar y, si un buque de superficie o simplemente un bote estaban dentro del alcance de un enlace LoRa, disponer de esa información en tiempo real. La tecnología LoRa no sólo permite el conocimiento en tiempo real de las trayectorias de las boyas, también ayuda a su localización para su recuperación, siempre y cuando se haga dentro del tiempo de autonomía de las boyas. El sistema cumple con los requisitos fijados de número de boyas, obtención de la posición, almacenamiento de las trayectorias, transmisión en tiempo real a un receptor que se encuentre dentro del alcance del enlace LoRa y almacenamiento de cada trayectoria en un ordenador de tipo PC. Las tareas pendientes son hacer pruebas de mar, es decir, desplegar las boyas en el mar y recuperarlas dentro del tiempo de autonomía, dictado por la energía eléctrica de los acumuladores de las boyas. Una vez comprobado el correcto funcionamiento de todo el sistema, se podrán integrar las trayectorias de las boyas en los procesos de asimilación de datos de los modelos numéricos que simulan la dinámica de las zonas interesadas por los experimentos lagrangianos

