











 Espanhol (pdf)
Espanhol (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por email Citado por SciELO
Citado por SciELO  Similares em
SciELO
Similares em
SciELO 
 Permalink
PermalinkINTRODUCCIÓN
Las malas hierbas compiten con los cultivos por recursos vitales, afectando negativamente al crecimiento de los mismos y a su rendimiento potencial. La detección temprana de las infestaciones de malas hierbas se presenta como un factor crítico para asegurar el éxito de la aplicación de estrategias de gestión localizada de malas hierbas (site-specific weed management, SSWM) adaptadas a cada ubicación, ya que las diferentes especies pueden requerir enfoques de control distintos (Fernández-Quintanilla et al., 2022). La SSWM es una aproximación enfoque agronómica que implica identificar y gestionar las malas hierbas según su ubicación espacial y distribución, en lugar de aplicar tratamientos uniformes en todo el campo (Lati et al., 2021). Sin embargo, la clasificación de las especies de malas hierbas en estado temprano suele ser compleja y requiere elevados recursos temporales y de análisis debido a las similitudes morfológicas entre la mayoría de las especies de malas hierbas y las plantas de cultivo; además, se necesitan herramientas especializadas y conocimientos de expertos (Fernández-Quintanilla et al., 2018). La identificación incorrecta de las malas hierbas y las consiguientes decisiones erróneas en el tratamiento suelen ocasionar una disminución en la eficacia del control y repercutir negativamente en la producción final del cultivo.
Los avances tecnológicos, como los vehículos aéreos no tripulados (UAV) y el aprendizaje automático (machine learning, ML), están transformando la agricultura al proporcionar nuevas formas de adquirir la información y técnicas para su análisis que pueden ayudar a los agricultores a tomar decisiones fundamentadas y a optimizar las operaciones y recursos en el campo. Por un lado, los UAV son capaces de captar imágenes de alta resolución sobre grandes áreas de cultivo, lo que les confiere usos diversos como la topografía, la vigilancia medioambiental o la exploración y cartografía de cultivos, con una aplicación particular en la detección de malas hierbas, plagas y enfermedades (Rejeb et al., 2022). Por otro lado, el ML y, en particular, los algoritmos de aprendizaje profundo (deep learning, DL), han demostrado un éxito significativo en el procesamiento de imágenes, mejorando la precisión de las tareas de clasificación (Mesías-Ruiz et al., 2023). Algunas técnicas específicas de DL, como las redes neuronales convolucionales (CNN), son altamente adecuadas para tareas de visión por computadora, incluido el reconocimiento de imágenes (Ioffe & Szegedy, 2015).
Ciertas investigaciones han abordado la problemática de manera integral, explorando tecnologías avanzadas y enfoques innovadores para la detección y control preciso de las malas hierbas a partir de imágenes UAV. Por ejemplo, Huang et al. (2018) generaron mapas de la cubierta vegetal. Su enfoque basado en una red totalmente convolucional demostró una alta eficacia y precisión en la cartografía de malas hierbas. En este contexto. y considerando la reducida información disponible sobre la implementación de mapas georreferenciados de malas hierbas en condiciones reales de cultivo, el objetivo principal de esta investigación fue desarrollar una metodología que proporcione información sobre la especie de mala hierba y su georreferenciación en parcelas de cultivos de maíz y tomate en estado temprano, a partir de imágenes del espectro visible (RGB) de UAV. Los objetivos específicos de este estudio se detallan a continuación:
1. Crear un amplio conjunto de datos que incluya especies de malas hierbas en sus primeros estados de crecimiento, destinado al entrenamiento y validación del modelo creado.
2. Detectar, localizar e identificar las especies de malas hierbas en parcelas y validar los resultados.
3. Crear mapas georreferenciados para llevar a cabo control basado en SSWM.
MATERIALES Y MÉTODOS
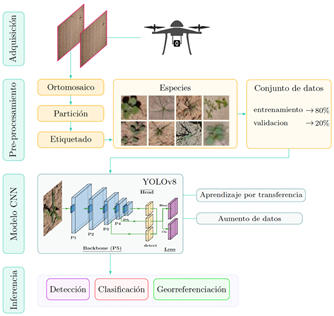
Se seleccionaron dos cultivos de verano de relevancia mundial (maíz y tomate) y ocho especies comunes de malas hierbas como sistemas cultivo-maleza de referencia para llevar a cabo esta investigación. El procedimiento completo consistió en cuatro etapas (Figura 1): 1) adquisición de imágenes UAV, 2) preprocesamiento de imágenes incluyendo la construcción de ortomosaicos, la división de los ortomosaicos en imágenes de 1000(1000 píxeles y el etiquetado de plantas, lo que condujo a la generación del conjunto de datos de malas hierbas, 3) creación del modelo, que incluyó la extracción de características con capas convolucionales, aplicación de las técnicas de aprendizaje por transferencia basado en ImageNet-1k (Krizhevsky et al., 2012), aumento de datos, y 4) proceso de inferencia para evaluar la capacidad del modelo en la generalización del conocimiento. Posteriormente, con la información de la detección y clasificación de las especies, se crearon los mapas georreferenciados de malas hierbas.
Zona de estudio
Las imágenes UAV se recogieron en un campo experimental de maíz situado en Arganda del Rey (Madrid, España) y en un campo comercial de tomate situado en Santa Amalia (Badajoz, España), con coordenadas centrales 40° 18′ 59,25′′ N, 3° 29′ 21,53′′ O y 38° 59' 39,0" N, 6° 03' 31,7" O (sistema de coordenadas Lat/Lon, datum WGS84) respectivamente. Durante los vuelos, las plantas de maíz se encontraban en la fase temprana de crecimiento de 4 hojas desplegadas (BBCH 14), y las de tomate en la fase temprana de primer botón floral visible (BBCH 501) (Meier, 2018).
La adquisición de imágenes se llevó a cabo con un UAV cuadricóptero, modelo md4-1000 (microdrones GmbH, Siegen, Alemania), y una cámara comercial de bajo coste con sensor rojo-verde-azul (RGB), modelo Sony ILCE-6300L (Sony Group Corporation, Tokio, Japón). La cámara disponía de un sensor CMOS Exmor® de tipo APS-C (23,5×15,6 mm) que captura imágenes de 6.000×3.376 píxeles con 24,2 megapíxeles efectivos. El recorrido del UAV se diseñó para volar a una velocidad de 2 m/s, con un solapamiento frontal y lateral del 70%, y a una altitud de 11 metros sobre la superficie. Se inspeccionaron aproximadamente 0,75 ha del campo de maíz y 1,2 ha del campo de tomate, lo que generó un conjunto de 565 y 895 imágenes, respectivamente, con una distancia de muestreo del suelo (GSD) de 0,17 cm/píxel en cada campo. Se realizaron los ortomosaicos con el software Agisoft PhotoScan (Agisoft LLC, St. Petersburg, Rusia).
Pre-procesamiento
Expertos en malherbología etiquetaron las especies empleando la herramienta gráfica de software gratuito labelImg (Tzutalin, 2015). En esta investigación se identificaron ocho especies de malas hierbas comunes presentes de forma natural: Chenopodium album L., Convolvulus arvensis L., Cyperus rotundus L., Lolium rigidum Gaud., Portulaca oleracea L., Salsola kali L., Solanum nigrum L. y Sorghum halepense (L.) Pers. Se seleccionó un número total de 15.789 etiquetas de malas hierbas para el conjunto de datos, que se dividieron en entrenamiento y validación distribuido en 80% y 20%, respectivamente.
Detección y Clasificación
El modelo YOLOv8m (Jocher et al., 2023), es una CNN diseñada para la detección de objetos, fue seleccionado para este estudio debido a su combinación de velocidad y precisión en su entrenamiento e inferencia, respectivamente. El modelo fue entrenado utilizando el conjunto de datos etiquetados con el framework KerasCV. Durante el entrenamiento se aplicó la técnica de aprendizaje por transferencia.
Inferencia
Para validar la capacidad de generalización del conocimiento se determinó de acuerdo al criterio de los expertos un conjunto de 200 plantas de malas hierbas por especie como verdad-terreno sobre otro cultivo de tomate de la misma zona correspondiente al estado BBCH 509.
RESULTADOS Y DISCUSIÓN
El modelo creado tuvo como resultados una precisión alta en la clasificación de las ocho especies de malas hierbas. Sobre el conjunto verdad-terreno, el modelo logró una detección del 99% para Cyperus rotundus L., identificando correctamente 198 de los 200 elementos. Para Portulaca oleracea L, el rendimiento es óptimo, con la detección correcta de los 200 elementos, sin embargo, la detección presenta una dificultad cuando se trata de Solanum nigrum L. al detectarse 186 plantas.

Figura 2 (a) Mapa de malas hierbas generado con el modelo YOLOv8m para el cultivo de tomate. (b) Especies identificadas de malas hierbas georreferenciadas. ★ Cyperus, • Portulaca, + Solanum.
La capacidad de discriminación entre especies en este escenario presentó resultados prometedores superiores al 99% por cada especie. Sin embargo, es crucial abordar las limitaciones observadas en la clasificación de Solanum nigrum L., donde se identificaron dos casos de confusión con Portulaca oleracea L.
CONCLUSIONES
Esta investigación creó un gran conjunto de datos a partir de imágenes de UAV e implementó eficazmente el modelo YOLOv8-m para detectar, clasificar y localizar ocho especies diferentes de malas hierbas que crecen habitualmente en los cultivos de maíz y tomate. Este estudio supone una contribución significativa no sólo al mostrar un gran rendimiento de una compleja arquitecturas CNN de última generación, sino también al proporcionar una metodología para la clasificación precisa de las malas hierbas a nivel de especie durante las primeras fases de crecimiento en el mundo real. Esto es especialmente crítico porque, en la fase inicial de desarrollo, las diferencias morfológicas y fisiológicas entre especies pueden ser mínimas.

